






 BTC/HKD-0.87%
BTC/HKD-0.87% ETH/HKD-2.86%
ETH/HKD-2.86% LTC/HKD-2.36%
LTC/HKD-2.36% DOT/HKD-2.58%
DOT/HKD-2.58% ADA/HKD-2.91%
ADA/HKD-2.91% SOL/HKD-3.02%
SOL/HKD-3.02% XRP/HKD-3.78%
XRP/HKD-3.78% DOGE/US-3.52%
DOGE/US-3.52% 
FOHEART·X動作捕捉系統

FOHEART·X動作捕捉系統1.2.1步態分析的技術分類
目前主流的步態分析技術主要有以下幾種:基于計算機視覺的人體步態捕捉與分析、基于慣性傳感器的人體步態捕捉與分析、基于無線信號的人體步態捕捉與分析。基于計算機視覺的人體步態捕捉又分為基于紅外攝像頭、基于2D攝像頭、基于3D深度攝像頭等多種。上個世紀的技術路線還有基于機械式的步態捕捉。其他的技術路線還有基于電磁式的步態捕捉。
1.2.1.1基于紅外攝像頭的光學步態捕捉
紅外光學動作捕捉技術經歷數十年的持續發展,目前常用的紅外光學動作捕捉技術都是基于計算機視覺原理。紅外攝像頭的光學步態捕捉主要分為被動式和主動式。被動式是在人體關鍵部位粘貼反光標記點,主動式是在人體主要部位佩戴上可發射紅外線的主動式攝像頭。本節主要說明被動形式的光學步態捕捉。在人體的主要骨骼部位以及關節處粘貼反光標記點,利用架設好的紅外攝像頭追蹤反光標記點,從而計算出反光標記點在空間中的絕對位置。反光標記點和紅外攝像頭分別如圖1-1和圖1-2所示。

圖1-1反光標記點
Fig.1-1Reflectivemark
BNB Chain上交易對Water/USDT目前疑似Rugpull:金色財經報道,根據Shark Team鏈上分析平臺Chain Aegis的安全監控,BNB Chain上交易對Water/USDT目前疑似Rugpull,流動性已歸零。[2023/9/2 13:13:50]

圖1-2紅外攝像頭
Fig.1-2Infraredcamera
反光標記點既不會接收無線信號也不會向外發射任何無線信號,它的表面涂抹了一種特殊熒光材料,可以很好地讓紅外攝像頭識別到并反射回高質量的圖像信號。
紅外攝像頭一般采用RJ45接口,通過網線連接匯聚到交換機,再由交換機統一將數據轉發到計算機。整個系統如圖1-3所示。

圖1-3基于紅外攝像頭的光學動作捕捉系統結構圖
Fig.1-3Structurediagramofopticalmotioncapturesystem
計算機的上位機軟件經過一系列的算法識別還原出人體的步態。其算法流程如圖1-4示。

圖1-4基于紅外攝像頭的光學動作捕捉系統算法流程圖
幣安將于7月18日對BNB信標鏈進行錢包維護:7月14日消息,幣安公告稱,將于北京時間7月18日15:00對BNB信標鏈(BEP2)進行錢包維護,維護時間大約需1小時。BNB信標鏈將于北京時間7月18日14:55起暫停充值與提現。錢包維護期間,BNB信標鏈(BEP2)上的數字資產/貨幣交易不會受到影響。[2023/7/14 10:55:29]
Fig.1-4Algorithmflowchartofopticalmotioncapturesystem
基于紅外攝像頭的光學步態動作捕捉系統優點是技術成熟度高,采樣頻率高,加之目前的高性能計算機數據處理速度極快所以延遲很低,且精度很高,使用范圍廣,應用領域眾多。主要缺點是對光照特別敏感,不能在光變化較大的環境下使用,周圍不能有和光學標記點相近的物體或光斑,所以光學步態捕捉一般只在室內使用。由于攝像頭的視場角有局限性,且人在運動時有的標記點很容易受到其他物體及自身的遮擋,這就造成被遮擋部位數據的丟失。后期數據處理工作量很大,由于數據量大且需要處理丟失、跳幀等問題,需要較長的后期處理時間。缺點還在于需要架設相機,相機一般架設到鋼架結構上,這就造成使用場景一般比較固定,不能輕易的挪動。一般的場景至少需要6個攝像頭,如果需要追蹤更大的場景,需要的攝像頭數量高達幾十個,且單個攝像頭價格十分價貴,比如Vicon公司生產的單個攝像頭價格高達十萬元人民幣,這就造成紅外光學式步態捕捉還是應用到科學研究方面,無法走進大眾。
目前市面上生產紅外攝像頭的光學步態捕捉的公司有英國的Vicon公司、美國NaturalPoint公司、美國MotionAnalysis公司、中國的青瞳視覺公司等。NaturalPoint公司生產的Optitrack系統如圖1-5所示。
Grayscale CEO對貝萊德、富達和其他大型資管公司進軍加密領域表示歡迎:金色財經報道,Grayscale Investments首席執行官Michael Sonnenshein對貝萊德、富達和其他大型資產管理公司進軍加密貨幣領域的努力表示歡迎。[2023/7/12 10:49:51]
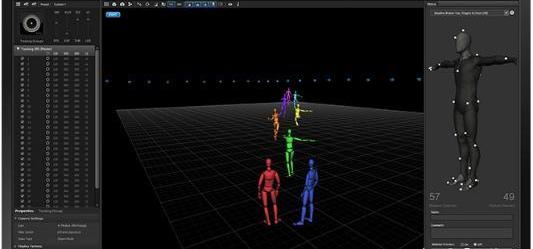
圖1-5Optitrack系統
Fig.1-5Optitracksystem
1.2.1.2基于3D深度攝像頭的動作捕捉
隨著3D深度相機技術的成熟,有許多研究者開始研究基于深度相機的動作捕捉系統。3D深度攝像頭與2D攝像頭的區別在于,除了能夠獲取平面圖像外還可以獲得深度信息。3D深度技術目前廣泛應用在人體步態識別、三維重建、SLAM等領域。目前主流的3D深度攝像頭的技術路線有:雙目立體視覺;飛行時間;結構光技術等。
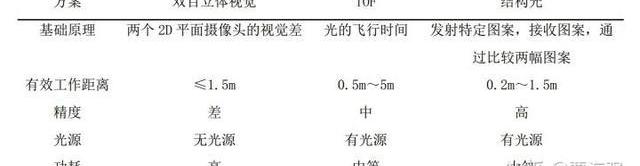
雙目立體視覺即使用兩個2D平面攝像頭。兩個平面攝像頭獲得兩幅圖像,通過兩幅圖像算出深度信息。飛行時間即由雷達芯片發射出紅外激光散點,照射到物體后反射回雷達芯片的時間,由于光速已知,發射返回時間已知即可測量出攝像頭距物體的距離,。結構光是攝像頭發出特定的圖案,當被攝物體反射回這一圖案時,深度攝像頭再次接收這一圖案,通過比較發射出的圖案和接收的圖案從而測量出攝像頭距離被攝物體的深度信息。3D深度攝像頭方案對比如表1-1所示。
表1-13D深度攝像頭方案對比
Tab.1-13Ddepthcameraschemecomparison
以太坊質押數量自Shapella升級以來激增440萬枚:金色財經報道,自4月12日以太坊實施Shapella升級以來,已有超過440萬枚ETH被存入以太坊合約,總數量達到2258萬枚。Bitfinex分析師在一份周報中表示,對質押的需求激增可能源于大型ETH持有者,他們不愿意清算自己的持股,而是尋求產生被動收入。這種趨勢預計會持續下去,特別是考慮到通貨緊縮的力量預計會大大推動ETH的價格。[2023/5/23 15:20:40]
利用結構光方案的產品有微軟公司推出的Kinect,其廣泛的應用在體感交互、人體骨架識別、步態分析等領域。Kinect如圖1-6所示。

圖1-6微軟公司的Kinect
Fig.1-6KinectofMicrosoft
基本原理是首先找到圖像中移動的物體,然后會對移動的物體進行深度評估,識別出人體的部位,然后將其從背景環境中分割出來。分割之后要做的工作就是模式匹配,將其匹配到骨骼系統上。算法流程如圖1-7所示。

圖1-7光學動作捕捉算法流程圖
Fig.1-7Algorithmprocess
26636枚ETH從未知錢包轉入Coinbase:金色財經報道,Whale Alert數據顯示,26,636枚ETH(價值39,143,078美元)從未知錢包轉入Coinbase。[2023/3/12 12:58:18]
以上三種方案的3D深度攝像頭方案大部分用在娛樂級別方面,比如臉部識別解鎖、人機互動,且由于其探測距離較近,很難用在大空間上。目前基于3D深度攝像頭的芯片在不斷地研究改進中。其硬件芯片仍是目前的難點之一,再其次是算法的復雜度,大量的圖像計算對硬件的主控芯片的計算能力有較高的要求,在功耗上很難做到低功耗的工作,受制于目前的電池技術,單個傳感器的工作時間比較短。其優勢在于不需要用戶穿戴任何傳感器和粘貼標記點。利用Kinect進行人體下肢骨架識別如圖1-8所示。

圖1-8Kinect人體骨架識別
Fig.1-8Kinectforhumanskeletonrecognition
1.2.1.3基于2D攝像頭的動作捕捉
利用2D攝像頭實現3D運動軌跡的捕捉是目前的前沿技術研究。2D攝像頭即平面攝像頭,沒有深度信息。目前基于2D攝像頭的動作捕捉主要采用卷積神經網路將稀疏的2D人體姿態凸顯檢測的原理。但是此種捕捉方案需要長時間的運算,并不適合實時的運動分析,且輸出精度低。基于2D攝像頭的動作捕捉目前可以捕捉人體局部的運動姿態,且捕捉之間需要采集大量的數據樣本作為訓練數據集。2D攝像頭在深度信息的預測上存在著偏差,任何一點錯誤的數據都會導致很大的偏差,穩定性極差。最大的挑戰在于攝像頭的遮擋以及快速的運動都是2D攝像頭很難追蹤到的。其優點在于不需要任何的穿戴,且所需要的2D攝像頭觸手可得,成本極低,這對大眾化的應用是一個不錯的選擇。利用2D平面攝像頭的姿態捕捉應用如圖1-9所示。

圖1-9利用2D平面攝像頭姿態捕捉
Fig.1-9Using2Dplanarcameraattitudecapture
1.2.1.4基于MEMS慣性傳感器的慣性動作捕捉系統
基于MEMS慣性傳感器的動作捕捉系統在各個領域都有應用,包括虛擬現實、運動訓練、生物醫學工程和康復。因為它們體積小、重量輕、價格合理。
慣性動作捕捉系統主要是將慣性傳感器綁定在人身體主要骨骼上,如足、小腿、大腿,實時測量出每段骨骼的旋轉,利用正向運動學和反向運動學實時推導計算出整個人身體的運動參數。慣性動作捕捉系統的優勢在于他是一種無源的動作捕捉系統,不需要借助任何外部信息,即不受外界環境的干擾。缺點則是由于慣性傳感器普遍存在累計漂移會使慣性系統無法精確測量出運動的位移。其全身穿戴效果如圖1-10所示。
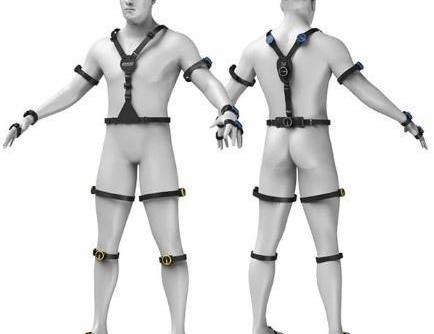
圖1-10基于MEMS慣性傳感器的慣性動作捕捉系統穿戴圖
Fig.1-10Awearableimageofinertialmotion
capturesystembasedonMEMSinertialsensor
慣性傳感器主要包括加速度計、陀螺儀、磁力計。其中加速度計、陀螺儀、磁力計多采用MEMS形式,所以稱之為MEMS慣性傳感器。三軸加速度計可以測量載體的三個軸向上的加速度,是一矢量,通過加速度我們也可以計算出載體靜止時的傾角。三軸陀螺儀可以測量出載體的三個軸向上角速度,通過對角速度積分我們可以得到角度,。三軸磁力計可以測量出周圍的磁場強度及與地球磁場的夾角。通過融合加速度、角速度、磁力值的數據我們可以精準的得到載體的旋轉。融合后的數據一般用四元數或歐拉角來表示。其中四元數形式如,歐拉角包含俯仰角、橫滾角、偏航角。得到載體的旋轉后再擬合各個骨骼的運動,從而計算出穿戴部位的運動姿態。通過對加速度、角速度的積分可以測量出穿戴者的步速、步距、步長等參數。世界上知名的MEMS慣性動作捕捉系統研發生產公司國外有荷蘭Xsens、國內的北京孚心科技公司等。綜述其原理如圖1-11所示。
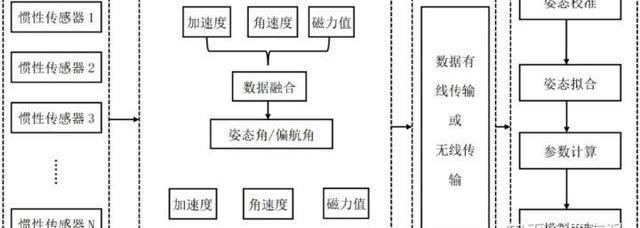
圖1-11慣性動作捕捉系統原理圖
Fig.1-11Schematicdiagramofinertialmotioncapturesystem
基于MEMS慣性傳感器的動作捕捉系統的步態分析有很大的優勢,主要體現在由于慣性動作捕捉系統采用的是MEMS芯片,成本較低,每個芯片只需要十元左右,整套系統的價格在幾萬元級別。由于慣性動作捕捉系統是一種無源的系統,整套系統的重量在幾千克的范圍內,所以便于攜帶,且不需要架設繁雜的相機。慣性傳感器只需要開機后就可以使用,沒有繁雜的校準、標定等操作步驟,所以使用十分便捷。慣性動作捕捉系統不受使用環境的影響,不管在室內、還是室外都可以正常使用。但是MEMS傳感器的精度相比于光學動作捕捉系統來講,精度較低,但對于大眾人群已經完全滿足其需求。由于MEMS式陀螺儀存在零偏且在動態情況下積分累計誤差會隨著時間的推移而產生較大的漂移。MEMS加速度計在不同的狀態下也存在誤差,特別是在高動態下。磁力計很容易受到強磁環境的干擾。但是這一系列的誤差問題都可以通過算法來補償。MEMS式慣性傳感器補償后的靜態精度一般可達到:俯仰角/橫滾角≤0.2°,偏航角≤1°;動態精度:俯仰角/橫滾角≤0.5°,偏航角≤2°,步態位移誤差可達5%。已滿足步態參數計算的精度要求。
1.2.1.5其他技術路線
機械式動作捕捉依靠穿戴在人身體的機械裝置來測量關節角度以及位移。人體運動帶動機械裝置的運動,從機械裝置上的角度傳感器可以知道運動角度,根據角度和機械部位的長度從而計算出移動位移。這一技術最早出現在20世紀,由于機械結構的笨重,在步態分析方面機械動作捕捉早已退出發展的主流。但利用機械外骨骼的搬運發展成了主流。其形狀如圖1-12所示。

圖1-12機械式動作捕捉
Fig.1-12Mechanicalmotioncapture
其他的技術路線還有基于聲學式的動作捕捉,基于電磁式的動作捕捉等。
金融先行,科技為基。處于金融與科技的交匯點,區塊鏈行業從來不缺熱點。在模式創新上,它像一個狂熱分子,偏執而堅定.
1900/1/1 0:00:00在影視劇當中,我們經常能夠看到富豪的身邊總是跟著一位保鏢來保護他的人身安全;藝術來源于生活,現實生活中,無論是富豪還是明星,在公眾場合出席時都會配有保鏢,但正所謂“伴君如伴虎”.
1900/1/1 0:00:00黃金和比特幣到底是什么每個人對他們的看法都不盡相同,愛他們的人愛得死去活來,很他們的人恨得此恨綿綿無絕期.
1900/1/1 0:00:00日本冷知識 動漫游戲迷們總是對日本有著一種蜜汁向往,畢竟是二次元的天堂嘛~但是對日本我們了解多少呢,今天給大家講幾個關于日本好玩的冷知識。日本的神社真的超級多,據說全國的神社比便利店的數量還多.
1900/1/1 0:00:00關鍵詞:暴富機會,比特幣,買房,互聯網,錯過! 總是錯過機會是因為: 事物的本質原因:機會在未展露頭角之前,它普遍被認為不可行或被認為是騙術。 個人原因 1.認知不夠 2.圈子太窄接觸不到.
1900/1/1 0:00:00貨幣的每一次演變都讓人驚奇。電子貨幣更是貨幣史上一次神奇的改座。近年來,隨著網絡商業化的發展,電子商務化的網上金融服務已經開始在世界范圍內開展.
1900/1/1 0:00:00


